文科省科研費新学術領域「ソフトロボット学」(領域代表:東京工業大学・鈴森康一氏)は12月4日、東京都江東区の日本科学未来館で「いいかげんなロボット展~ロボット科学の最先端 ソフトロボット学とは?~」を開催した。

文科省科研費新学術領域「ソフトロボット学」(2018~2022年度)は、生体システムの持つ「やわらかさ」に注目し、生体システムの価値観に基づいた自律する人工物の創造を目指しており、「いいかげん」を許容・活用して「好いかげん」を実現することを掲げている。
従来のロボット研究では主に、硬質な金属材料や1/100mm単位で制御できるモータなどで構成される頑丈で高精度なロボットが目指されてきた。しかし、そうした産業用ロボットには、泣いている赤ちゃんをあやすことができない、水の入ったコップを持ち上げることが難しいなど、苦手なことがたくさんある。ロボットがもっと我々の生活に入り込み役に立っていくには、生き物のような、やわらかいロボットにならなければいけない。ソフトロボット学は2022年度で最終年度を迎えるが、これまでに、予測できない状況にも柔軟に対応できる、やわらかい体と頭脳を持つ各種のロボット、「いいかげん=好いかげん」なロボット、つまりソフトロボットの研究開発を進めてきた。
本展示会では、しなやかな体と頭脳を持ち、しなやかな動きをする、以下のような独自のソフトロボットが多数展示された。
クラゲロボット
開発者:鈴森康一氏、植田大輝氏、難波江裕之氏、鈴木直美氏,山本陽太氏(東京工業大学)
独自開発の人工筋肉を内蔵し水中で優雅に動くクラゲ型ソフトロボットを披露。ロボットの皮膚には、マイクロレベルの細かな構造を作り込むことで、動きに応じてきれいに発色するようすと、優雅な動きが癒しを提供する。

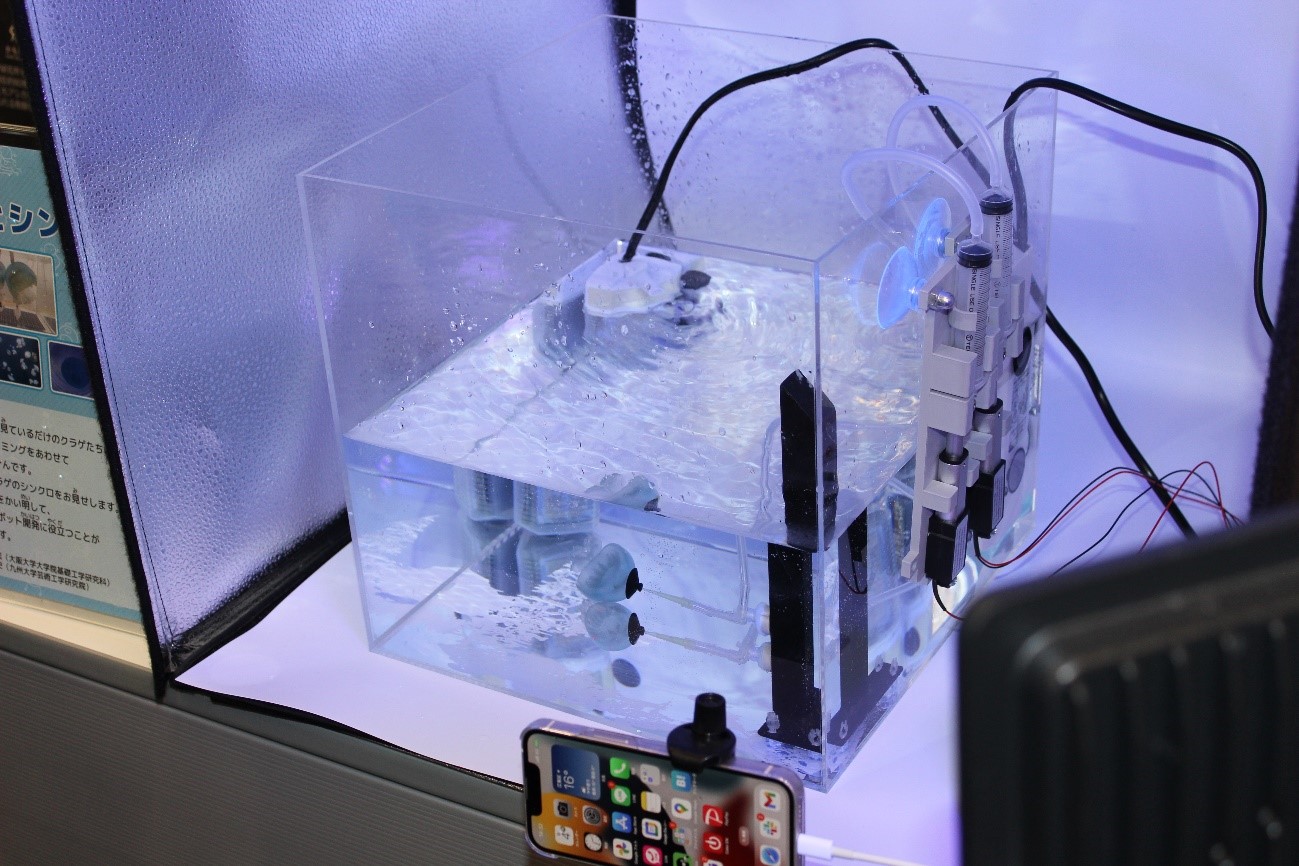
クラゲとシンクロ
開発者:清水正宏氏(大阪大学)、伊藤浩史氏(九州大学)
クラゲは群れるとタイミングを合わせてシンクロして泳ぐが、本展示ではクラゲのシンクロを披露、この現象を解明することで、クラゲの群ロボット開発に役立てようとしている。
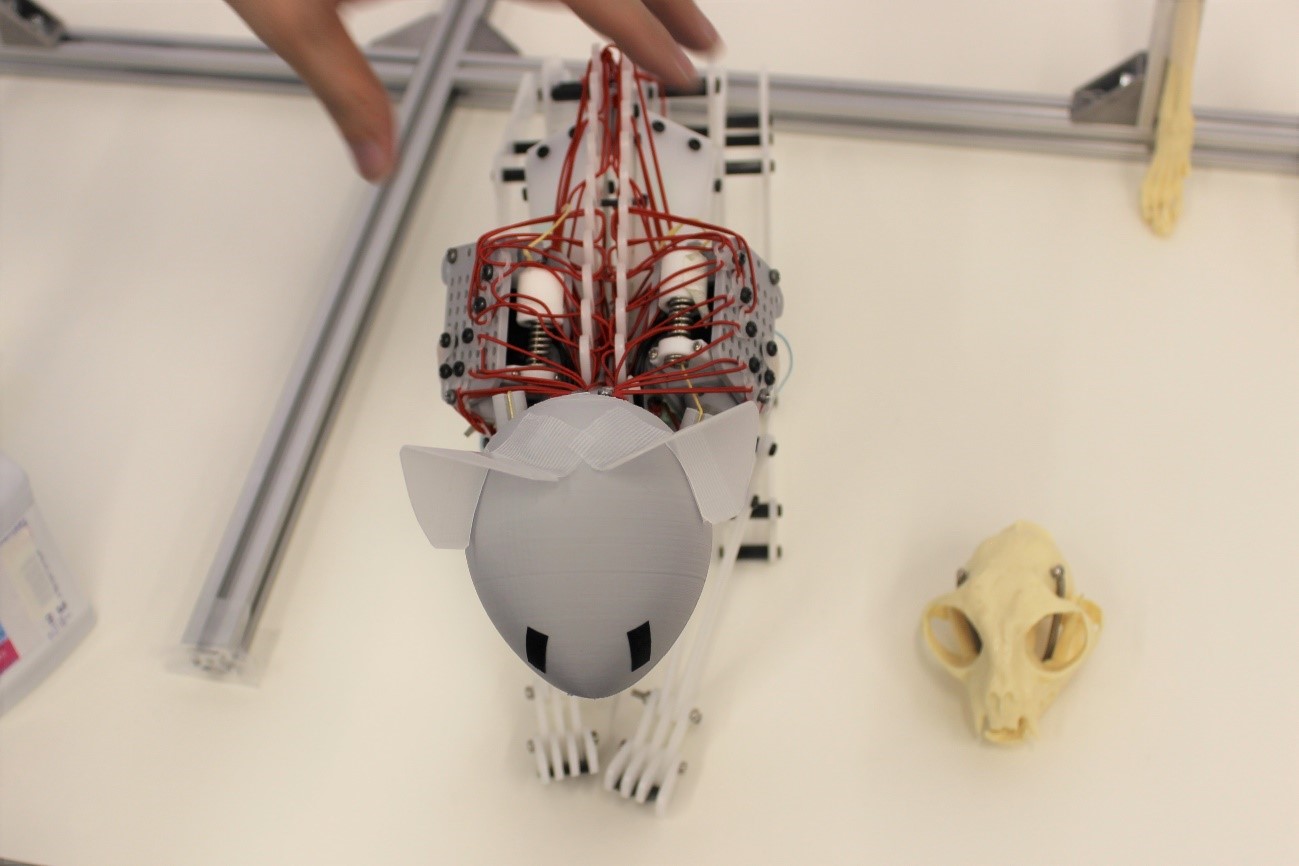
ネコのように 肩がぐにゃぐにゃ動く四足ロボット
開発者:福原 洸氏(東北大学)、郡司芽久氏(東洋大学)、増田容一氏(大阪大学)、多田隈建二郎氏・石黒章夫氏(東北大学)
猫やチーターなど走りの得意な動物は、肩のまわりをぐにゃぐにゃと動かすことができる。様々な運動タスクにおける柔軟な前脚の機能を明らかにするために開発した、動物の肩周りの大まかな筋肉の配置を模倣した四足ロボットを披露した。
3Dゲルプリンターによるゲルクラゲの造形とゲルクラゲ水槽
開発者:古川英光氏・川上 勝氏(山形大学)
ゲルというやわらかい材料を使って多様な三次元形状を印刷できる3Dプリンター「GelPiPer(ゲルパイパー)」と、ゲルパイパーを用いて製作したゲルクラゲを展示。やわらかい材料を自由な形に造形できる技術を発展させることで、人の体の一部を人工的に作れる可能性を示した。

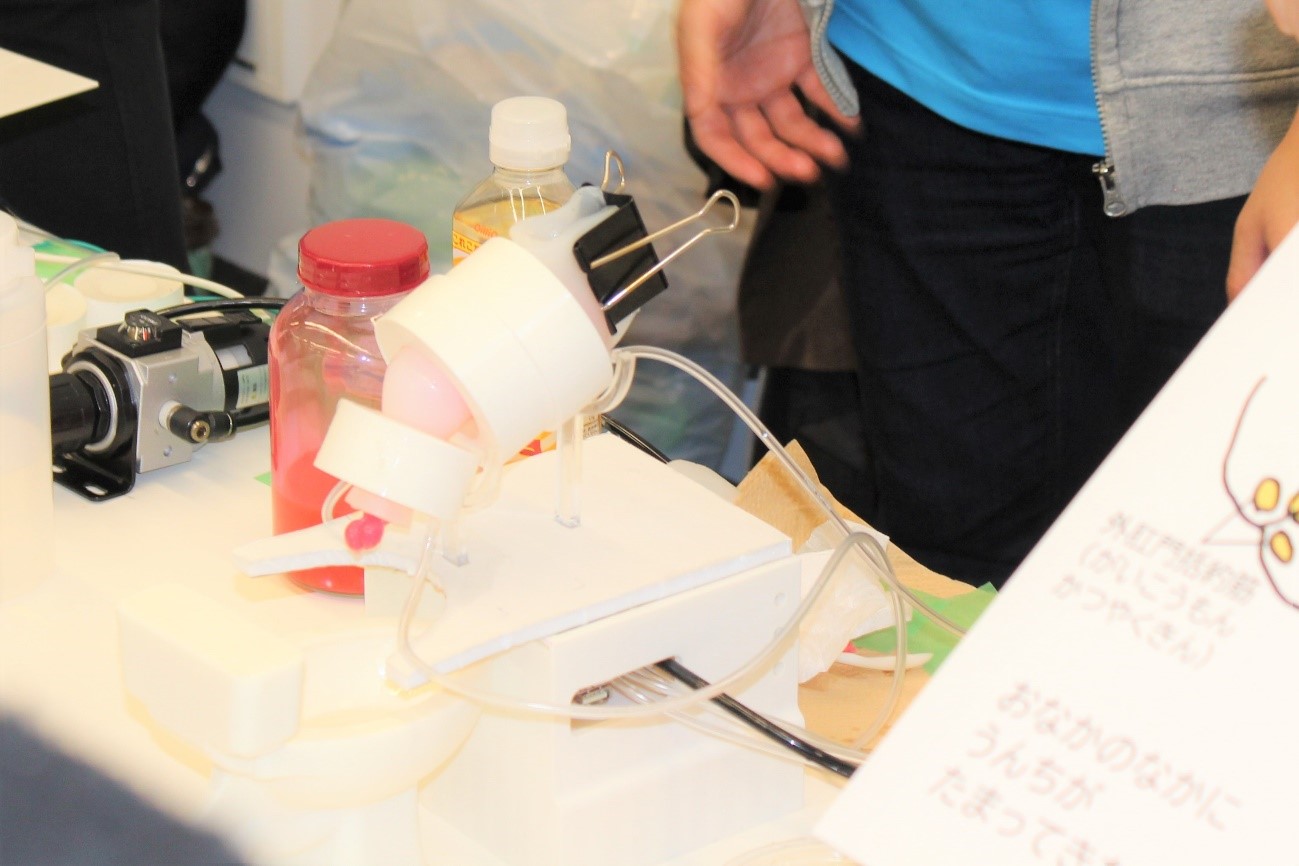
うんちロボ(排便シミュレータ)
開発者:宮川祥子氏(慶應義塾大学)、ソン・ヨンア氏(法政大学)、マオ・ゼエアビン氏・難波江裕之氏・前田真吾氏・鈴森康一氏(東京工業大学)、山口雄也氏(芝浦工業大学)、藤枝俊宣氏・堀井辰衛氏・岡田 慧氏(東京工業大学)、多田隈建二郎(東北大学)、澤田秀之氏(早稲田大学)
排泄する際の体の動き、つまり内肛門括約筋と外肛門括約筋の弛緩を模倣するソフトロボット(排便シミュレーター)を披露した。排泄の仕組みを解明することで、自分の力で排泄することが難しい人を介護できるロボットの可能性を示唆した。
ヒモムシロボット機構
開発者:多田隈建二郎氏・高橋知也氏(東北大学)
先端の内側から外側に折り返すやわらかい膜構造により、先端から伸びる紐状のメカニズムを開発。植物のつるのように先から伸びるので、狭いすき間でも体を擦らずに入っていける。体の先端を同じように動かせるヒモムシにヒントを得て、膜の中の水を出し入れすることで様々な形に変形しながら伸び縮みする細長いロボットを披露。災害現場など狭く崩れやすい場所での探査や、誰も入れない場所のサンプル収集などでの活躍を示唆した。

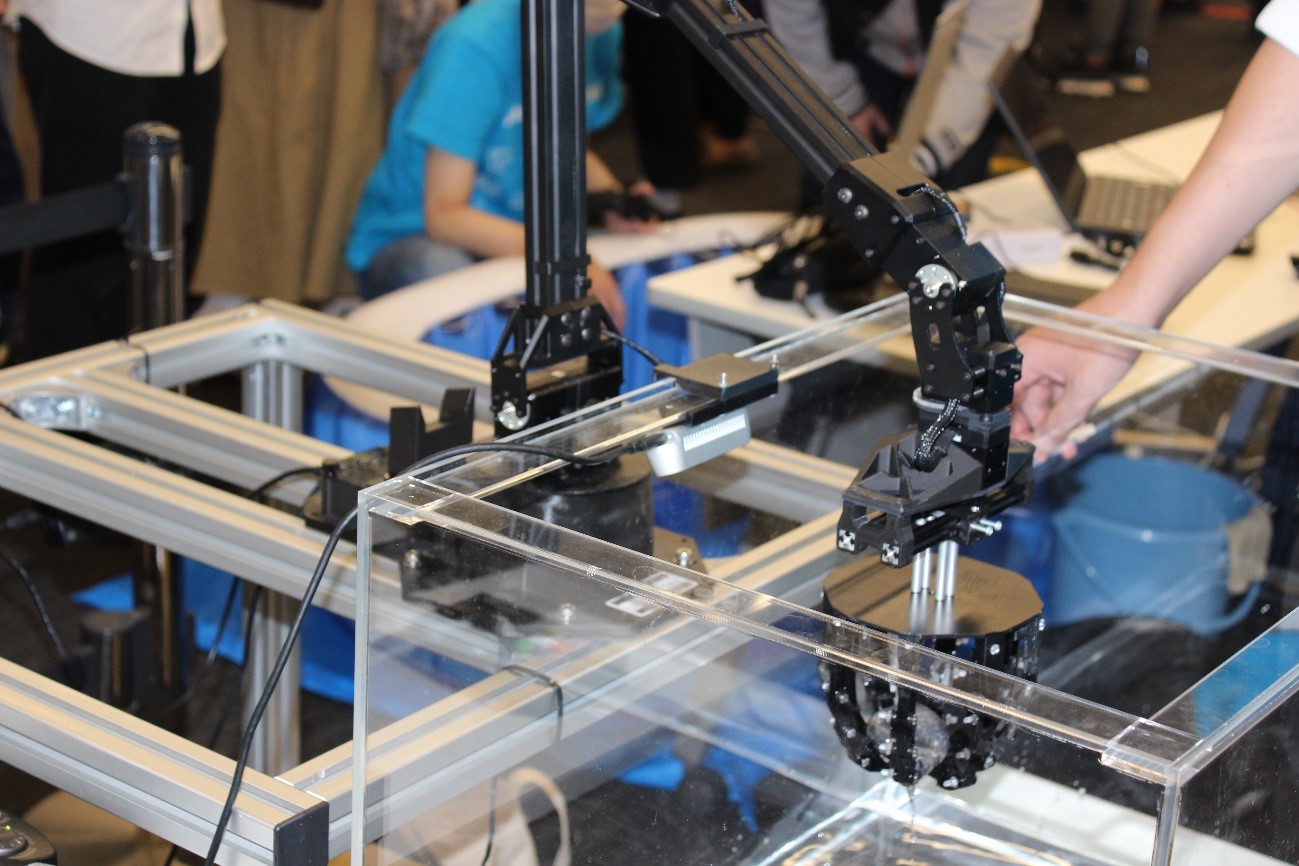
クラゲをキャッチするロボット
開発者:名手一生氏・王 忠奎氏・松野孝博氏・平井慎一氏(立命館大学)
やわらかくて掴みにくいクラゲを、モータを使わずにキャッチ&リリースするソフトハンドロボットを披露した。たくさんのクラゲの位置を特定してクラゲをやわらかくキャッチする技術によって、不定形の様々なものを持つことができることを示唆した。
Puff me up!(パフミーアップ) 身体から生えてくるやわらかい分身ロボット
開発者:ソン・ヨンア氏(法政大学)、鳴海拓志氏(東京大学)、新山龍馬氏(明治大学)
小型・軽量・安全かつデザイン自由度が高い分身ロボット「Puff me up!」を披露。外皮が布でできており、必要な時だけ空気でふくらんで現われ、内部の紐を制御することで狙った動きを作ることができ、使わない時には薄く折りたためる。服やアクセサリーのように身につけるものからフワッと他者が現れて動く、未来のコミュニケーションを提案した。

上記の展示のほか、古川英光氏・臼井昭子氏(山形大学)を司会に、「天才!ロボット博士となかまたちの好(い)いかげんな授業」が以下のとおり実施された。
・1時間目「ソフトロボット博士はクラゲが大好き!?」奥泉和也氏(鶴岡市立加茂水族館)、清水正宏氏(大阪大学)
・2時間目「ソフトロボットが生み出す 新しいコミュニケーションのかたち」宮川祥子氏(慶応義塾大学)、ソン・ヨンア氏(法政大学)、新山龍馬氏(明治大学)氏
・3時間目「シン学術領域 ソフトロボット学ってなんだ!?~未来のロボットはやわらかい!世界で注目されるソフトロボット学の最前線とは!?~」鈴森康一氏(東京工業大学)、多田隈建二郎氏(東北大学)
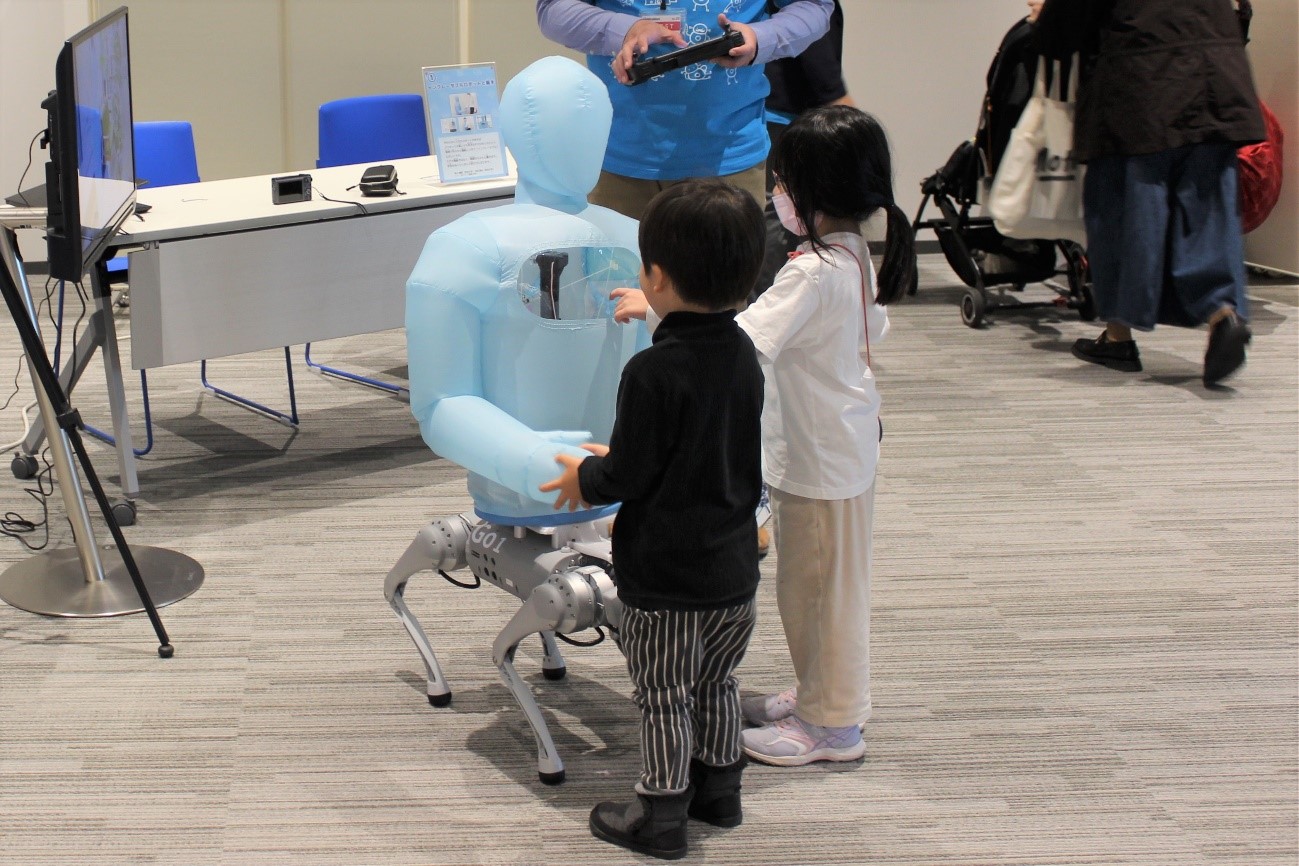
そのほか、体験コーナーが設けられ、「インフレータブルロボットと握手」(開発者:新山龍馬氏・池田昌弘氏(明治大学)、ソン・ヨンア氏(法政大学))では、やわらかい人型ロボットがあればぶつかっても転んでも安全なのではないかという発想で作られた風船構造(インフレータブル)ロボットを設置。関節がちゃんと動くことから、お辞儀したり握手することができる。このインフレータブルロボットに対し、参加した子供たちが握手したり抱き付いたりする場面が多く見られた。